

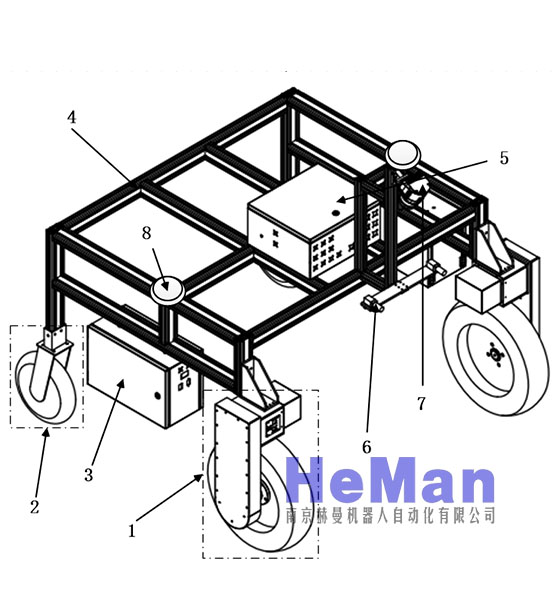
农业无人智能车辆平台系统组成

机动灵活。采用主动两轮驱动,车体转向由两轮转差控制,灵活性高,可以满足农业环境作业需求;
模块化设计。主动力驱动采用模块化设计,车体可以扩展转向模块添加悬浮机构,根据需要实际需求改装成四轮驱动车辆;
智能化自主作业。可实现障碍检测、作物行检测、行间定位、路径规划、路径跟踪等功能,完全实现自主作业,提高了生产效率;
一平台多用途。无人车辆尺寸、电机、减速器、电池等均按农业环境作业实际需求选型、定制,可以搭载喷药、施肥结构,播种、插秧结构等,实现一车多用,适用于不同的农业环境;
搭载机器人手臂。可以搭载多自由度机器人手臂,代替人手功能执行采摘、除草以及抓取等精准作业。

该平台搭载不同的作业机械可以完成相应的作业,如播种、插秧、施肥以及喷药等;
该平台可搭载多自由度机器人手臂,结合视觉感知和视觉伺服控制,代替人手功能执行采摘、除草以及抓取等精准作业。






研发地址:南京市玄武区孝陵卫200号
公司邮箱:hmrobot@163.com
技术合作:13813972137
产品咨询:18913852931
人力资源:18913852931