


爬壁机器人在玻璃表面工作

爬壁机器人在红砖墙面工作

爬壁机器人在瓷砖墙面工作

爬壁机器人在粗砂粒壁面工作

三维空间运动机器人技术,可以吸附在光滑或者粗糙的物体表面并灵活三维运动如高层楼宇的垂直墙壁、天花板或者桥底;
自适应吸附技术,适应于各种材质如钢筋混凝土墙壁、瓷砖、玻璃等表面自适应吸附和运动;
远程视觉监控及侦查识别技术,基于图像实时处理技术,在线记录图像、语音等、识别目标以及缺陷检测。

主要适应于三维空间的侦察及检测智能应用,比如:
公共安全高楼及室内信息侦查;消防火灾或地震场合信息侦查;桥梁、飞机、大坝、地铁等涵洞的安全检测;监控与搜救、核设施检测与维护。

1、最大移动速度:10米/分钟;
2、续航能力:40分钟;
3、最大负载能力:2千克;
4、遥控及视频传输距离:>100米;
5、适应于各种光滑和粗糙的壁面爬行。
 |
||
|
||
 |
|
 |
沪宁路桥、长江二桥试验 |
|
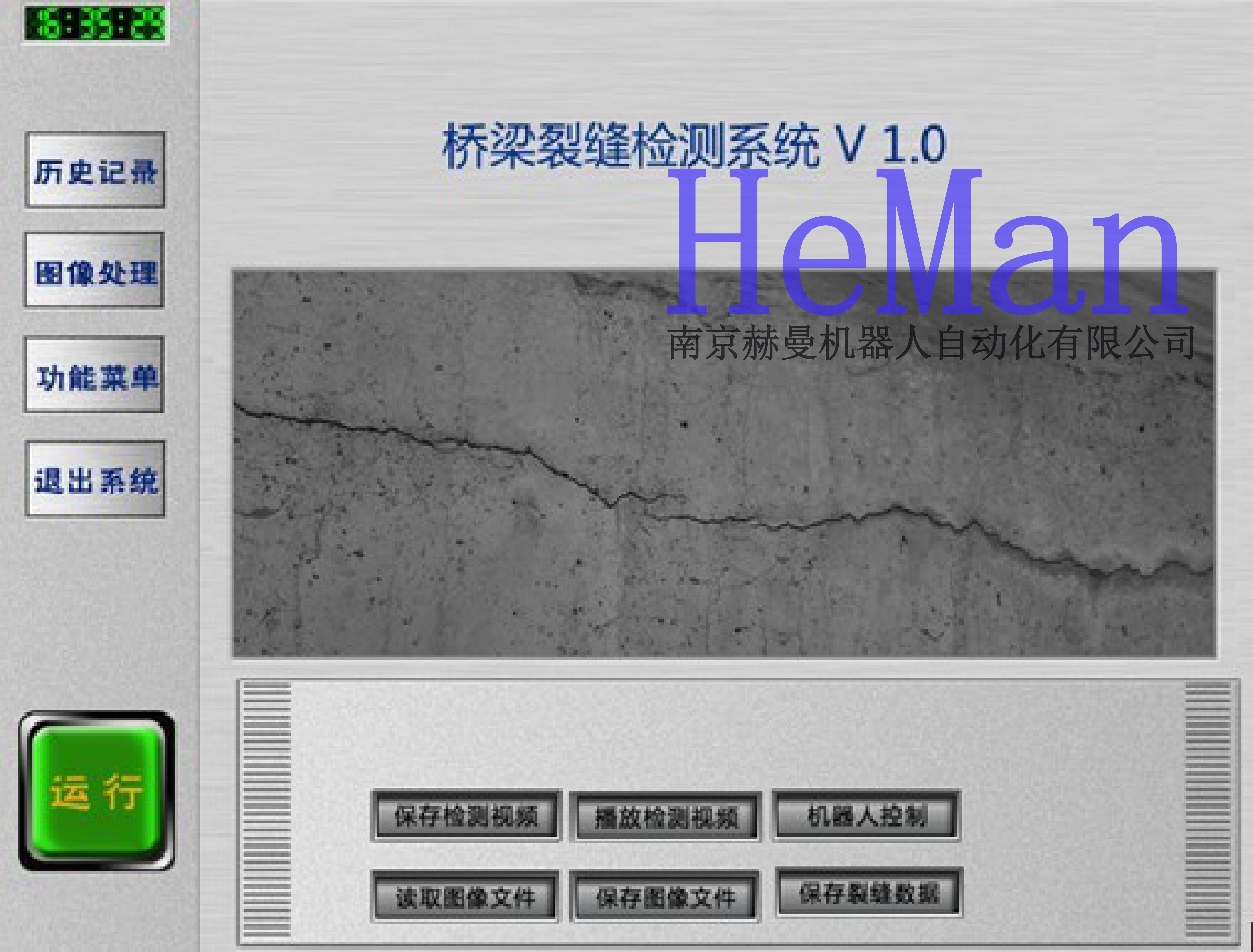
裂缝在线识别 |
 |
|
 |
|
 |

研发地址:南京市玄武区孝陵卫200号
公司邮箱:hmrobot@163.com
技术合作:13813972137
产品咨询:18913852931
人力资源:18913852931